导航与环境感知研究方向
一、方向简介
导航与环境感知技术,是以卫星/伪卫星/声学导航系统等交汇类导航方式与惯性导航方式融合,实现陆地、地下(室内)及水下高精度/高可靠性定位。
结合相机、激光雷达、多波束及声呐,实现水上水下一体化SLAM,为无人车、无人机、无人船及无人水下航行器提供导航信息。
二、现有基础
1. 组合导航硬件
1.1低成本GNSS/INS组合导航模块

低成本组合导航模块采用ublox系列低成本GNSS模块,STM3F7处理器,支持4G通讯,IMU采用Bosch公司BMI088,低成本组合适合用于对轨迹连续性要求较高但是对精度要求不高的管理型应用场景,比如港口、机场的车辆调度系统。
1.2低功耗GNSS/INS组合导航模块

低功耗组合导航模块的GNSS接收机采用ublox的M8低功耗系列,处理器使用了ST的低功耗的L433,IMU使用Bosch的BMI088,支持低功耗4G网络传输,适合对浒苔、溢油等跟踪的漂流浮标。
1.3无人系统专用组合导航模块
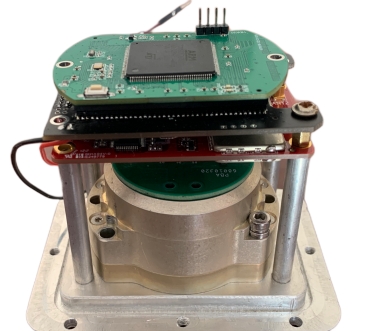
无人系统专用组合导航模块使用高性能AM335处理器,主频可达1GHz,IMU采用霍尼韦尔的HG4930/I300(可根据不同需求更换IMU),数据输出频率可500Hz,GNSS板卡支持10hz定位/定向,体积小,重量轻,适合于无人机、无人车、无人船等对体积和重量要求严格的智能无人系统的导航。
1.4测量型组合导航模块
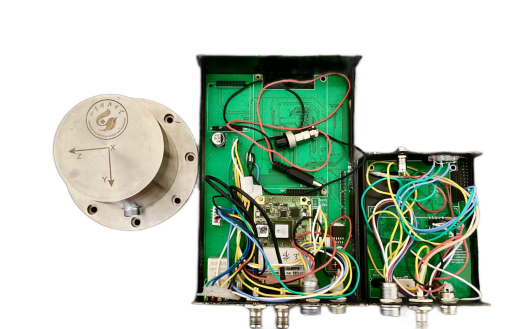
测量型组合导航模块使用了外置的IMU,适合安装在载体的不同位置上,具有大小两种板卡类型,处理器使用了STM32F7系列,IMU可以支持HG4930和BMI088等,支持市面上的大多数种类的卫星接收机,适用于车载,智能小车等应用场景。
2.无人系统
2.1无人车
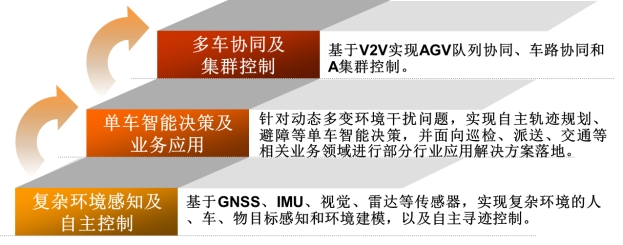
团队的无人车是基于自研的GNSS/INS组合导航系统,与激光雷达、深度相机、毫米波雷达等传感器相结合,实现复杂环境下的多元目标感知、环境建模、智能决策和集群控制。自研管控平台控制,实现控制指令远程下发和无人车远程监控、无人车自主巡航及巡检业务应用相关功能。现已完成第一阶段研究,进入第二阶段。

2.2无人船
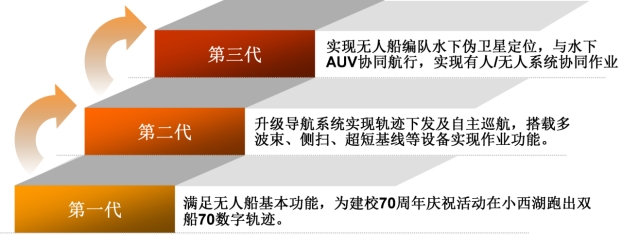
团队的无人船是基于自研的GNSS/INS组合导航系统,与多波束、侧扫声呐、激光雷达、深度相机、毫米波雷达等传感器,实现无人船的导航与智能感知,并与自研平台控制,实现平台下发指令,无人船自主巡航及作业,现已进入第二代,实现了多波束、侧扫及超短基线水下目标定位。

2.3智能工程机械
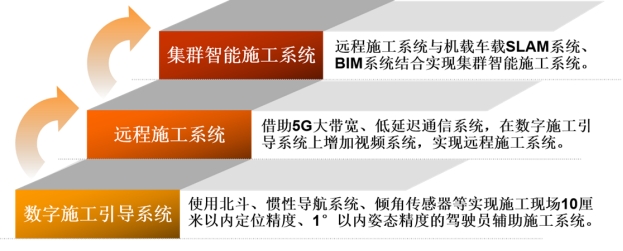
智能工程机械是集导航、感知、控制及信息化管理为一体的综合性无人系统,可以作为行业版无人驾驶,也可以是传统产业升级改造的典范。主要分为辅助施工系统、远程施工系统和集群智能施工系统三个阶段,目前团队已经实现了前两个阶段。

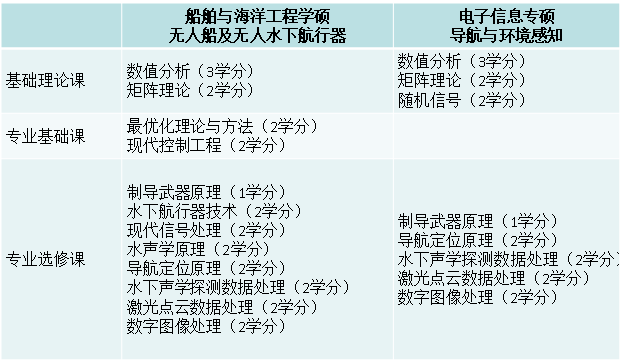
三、研究生课程
除公共基础课、公共选修课、之外,基础理论课、专业基础课和专业选修课主要有:
联系人:王胜利,shlwang@sdust.edu.cn










